Stunning at First Sight · Light yet Powerful
20 Active DOFs.
Dexterity beyond imagination.

Skeleton < 600g [1]
Ultra-light design,
unlocking endless possibilities

Four Dimensions of Dexterity
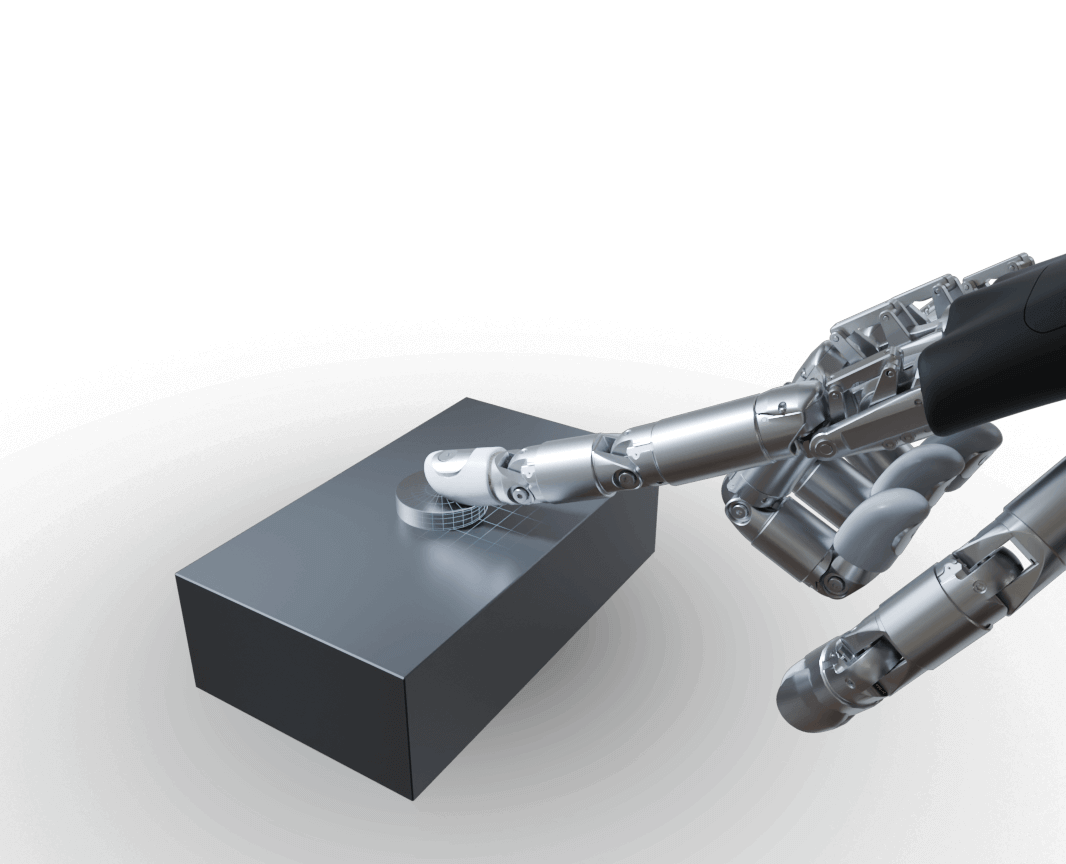
Precision
FOC control and dual-encoder feedback
deliver accuracy down to the finest detail
Fluidity
Fluid in motion, effortless in control.
Swift
All brushless motors, millisecond
response —— fast yet steady
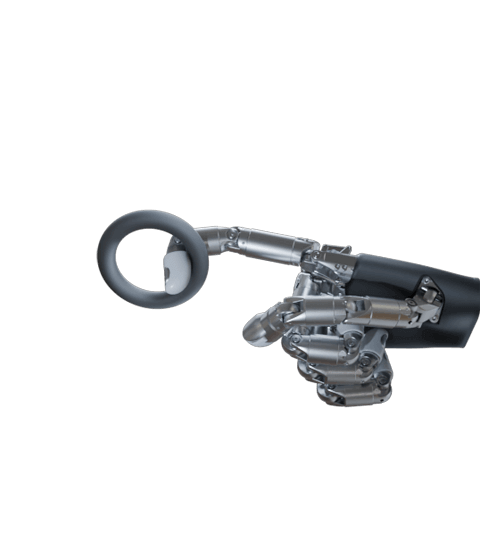
Powerful
Strength at the fingertips
Fingertip force >15 N[2]
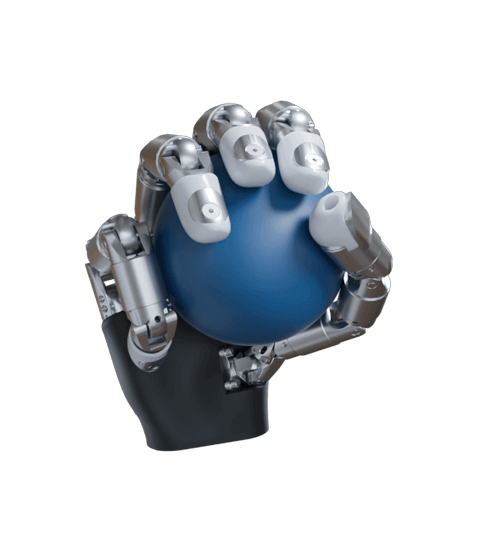
Strength in the whole hand
Static grasp load 10 kg[3]

Precision in Detail. Dexterity in Action.
Motion Atlas
Building the foundation of dexterous control, unlocking endless possibilities





The Whole Process in Hand
Product parameter table
| Active degrees of Freedom | 20 DOF, 4 DOF per finger |
| Number of finger joints | 20 DOF, 4 DOF per finger |
| Thumb Configuration | Fully opposable, with lateral swing support |
| Kinematic Configuration | Serially connected direct-drive rotary joints, free of nonlinear kinematic relationships. |
| Maximum grasping diameter | 100 mm |
| Self-weight (excluding cables) | 580 ± 10 g |
| Dimensions | 201 mm × 75 mm × 50 mm |
| Drive Mode | Self-locking Rotary Direct Drive Joint |
| Control Algorithm | FOC Vector Control Drive |
| Control Interface | Version 1: USB Version 2: EtherCAT |
| fingertip force | 15N |
| Single finger maximum load (hook grip) | 3kg |
| Maximum static load for whole-hand grasping | 10kg |
| Maximum static load for whole-hand vertical grasping | 5kg |
| Maximum hanging load | 5kg |
| Positioning repeatability | ± 1mm |
Steady as Stone · Industrial-Grade Reliability
Shock-Resistant Design
Twist-lock and slot structure stays rigid in normal use, yet releases under heavy impact to protect the dexterous hand.[4]
80cm drop, unscathed
inside and out[5]
300000 cycles of
durability and reliability[6]
0